

pcl立轴式破碎机3d演示
2023-01-02T19:01:00+00:00

立轴式破碎机工作原理及优缺点(附参数) 知乎专栏
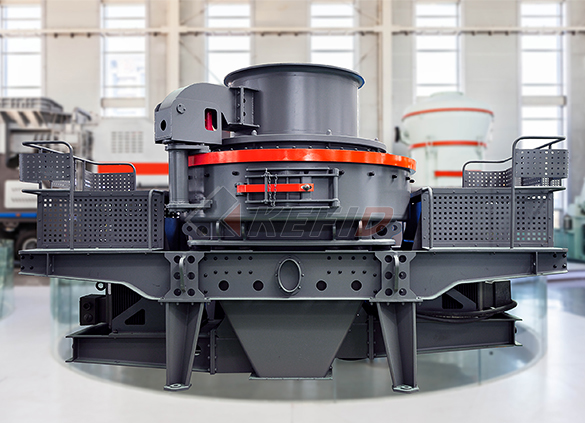
立轴式破碎机工作原理 1、物料由进料斗进入制砂机,经分料器将物料分成两部分,一部分由分料器中间进入高速旋转的叶轮中,在叶轮内被迅速加速; 2、而后一起冲击到涡支腔 Nov 7, 2015 立轴式破碎机由筒体、转子、机盖附件、底座等部分组成,筒体由机壳、门、隔板、 反击板组成,各部件分别用焊接螺栓、螺钉连结成一体;转子由主轴、锤架组成 PCL7504立轴锤式破碎机毕业设计(机械CAD图纸) 豆丁网May 17, 2016 PCL中目前实现了多种基于点云的曲面重建算法,如:泊松曲面重建、贪婪投影三角化、移动立方体、EarClipping等算法。 下面我将对泊松曲面重建算法和贪婪投影 基于PCL三维曲面重建pcl 表面重建大作家佚名的博客

三维凸包算法在PCL中的应用 CSDN博客
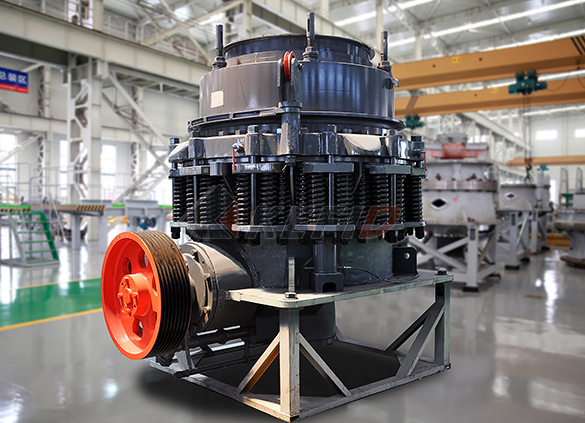
Aug 2, 2020 参考文章:三维凸包在pcl中得到某点云模型的凸包: 计 算 几 何 大作业 三维凸包算法的实现及其动画演示 实验报告 小组成员 软件学院 孙 聪 软件学 公众号『双愚』,相关视频:01PCL教程官网关于和入门指南滤波器和特征,【完整版】3D点云(3D point cloud)实战解析,PointNet、PointNet++、GCN算法解读! PCL(Point Cloud Library)学习入门指南代码实践(最新版) 圆锥破碎机工作原理使用3d动画为大家演示, 视频播放量 4464、弹幕量 1、点赞数 24、投硬币枚数 8、收藏人数 68、转发人数 49, 视频作者 湖北恒基矿机, 作者简介 专业矿山机械 圆锥破碎机工作原理使用3D动画为大家演示哔哩哔

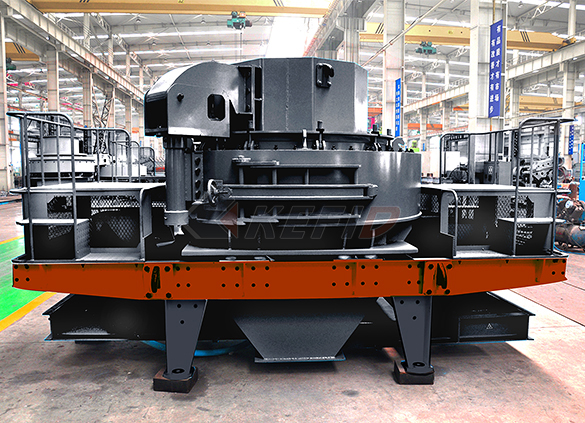
立轴冲击式破碎机工作原理3D视频动画矿机之家
Apr 26, 2022 3D原理列表 立轴冲击式破碎机工作原理3D视频动画 立轴冲击式破碎机工作原理3D视频动画 08:42 5737 1 作者: 鹿鸣 内容简介 收藏 制砂机 转载该视频是 介紹pcl立軸衝擊式制砂機,又叫PCL立軸破碎機,它是世界上廣泛用於替代錐碎機、對輥機、球磨機的機型。具有結構合理,拆卸方便,破碎效率高等特點。該PCL破碎機出料粒度 PCL直通衝擊式破碎機 百度百科PCL为3D感知领域提供了一种先进且广泛的方法,旨在为常见的需要用到3D功能的需求提供支持。 该库包含用于以下方面的最新算法:滤波,特征估计,表面重建,配准,模型拟合和分段。 PCL得到了国际机器人技术和感知研究人员的支持。 我们简要介绍下PCL,包括其算法功能和实现策略。 注1:文末附【三维点云】交流群 注2: 计算机视觉书籍汇总 一文详解点云库PCL 知乎 知乎专栏

Point Cloud Library The Point Cloud Library (PCL) is a standalone
The Point Cloud Library (PCL) is a standalone, large scale, open project for 2D/3D image and point cloud processing PCL is released under the terms of the BSD license, and thus free for commercial and research use Whether you’ve just discovered PCL or you’re a long time veteran, this page contains links to a set of resources that will help consolidate your PCL这个库大量使用了泛型编程来实现数据结构以及相关的算法,如果对照C++的联邦概念,它应该属于Template C++联邦,而且是一个非常优秀的泛型编程点云库,不过从学习的角度,它的难度要比Open3D高一些,由于泛型编程的大量使用,它的整个库的思路是其实就有 浅谈:点云库Open3D、PCL以及CGAL(C++) 知乎 知乎专栏PCL(Point Cloud Library) 是用于2D / 3D图像和点云处理的大型开源跨平台的C++编程库。 PCL框架实现了大量点云相关的通用算法和高效的数据结构。 内容涉及了点云的获取、滤波、分割、配准、检索、特征提取、特征估计,表面重建、识别、模型拟合、追踪、曲面 01点云及其可视化 黑马机器人 PCL3D点云

[机器视觉]PCL学习笔记 xgyopen blog
Dec 24, 2018 PCL(Point Cloud Library)是跨平台开源C++编程库。 PCL架构图 PCL中处理惯导的基本接口程序: 创建处理对象(例如过滤、特征估计、分割等) 使用setInputCloud通过输入点云数据,处理模块 设置算法相关参数 调用计算(或过滤、分割等)得到输出 PCL的模块化Apr 11, 2022 本教程演示了如何运行圆柱形模型的Sample Consensus分割。 为了使示例更实用一些,将以下操作应用于输入数据集 (按顺序): 距离15米以上的数据点被过滤 每一点的表面法线被估计 一个平面模型被分割,显示,并保存到本地 一个圆柱形模型 (在本数据集中是一个杯子)被分割,显示,并保存到本地 本次使用的数据集: PCL教程点云分割之圆柱体分割pcl::sacsegmentationSOC罗三炮 H S YDRAULIC SCHEMATICS mecawpHydraulic Systems Components Hydraulic Valve PRELIMINARY “Titan Boom 40 S” Service and Parts Manual Page 5 4 HYDRAULIC SCHEMATICS Figure 5 2 Hydraulic Schematic 2 of 2 ART ABC CV10 Titan Boom 40 S HYDRAULIC SCHEMATIC 2 of 2 PLATFORM SLIDE MOTOR T PLATFORM SLIDE hydraulic schematic

pcl ROS Wiki
The Point Cloud Library (PCL) is a standalone C++ library for 3D point cloud processing You can learn more about PCL by visiting its website, The documentation on will help you get started using PCL in your ROS applications In particular, if you're just getting started with PCL in ROS, we encourage you to make use of 上海矿山设备网提供沙石厂粉碎设备、石料生产线、矿石破碎线、制砂生产线、磨粉生产线 LM190K gaolingtushebeiPCLVisualizer 可视化类是 PCL 中功能最全的可视化类,与 CloudViewer 可视化类相比, PCLVisualizer 使用起来更为复杂,但该类具有更全面的功能,如显示法线、绘制多种形状和多个视口。 本小节将通过示例代码演示 PCLVisualizer 可视化类的功能,从显示单个点云开始。 大多数示例代码都是用于创建点云并 PCLVisualizer可视化类 Beingyoung 博客园
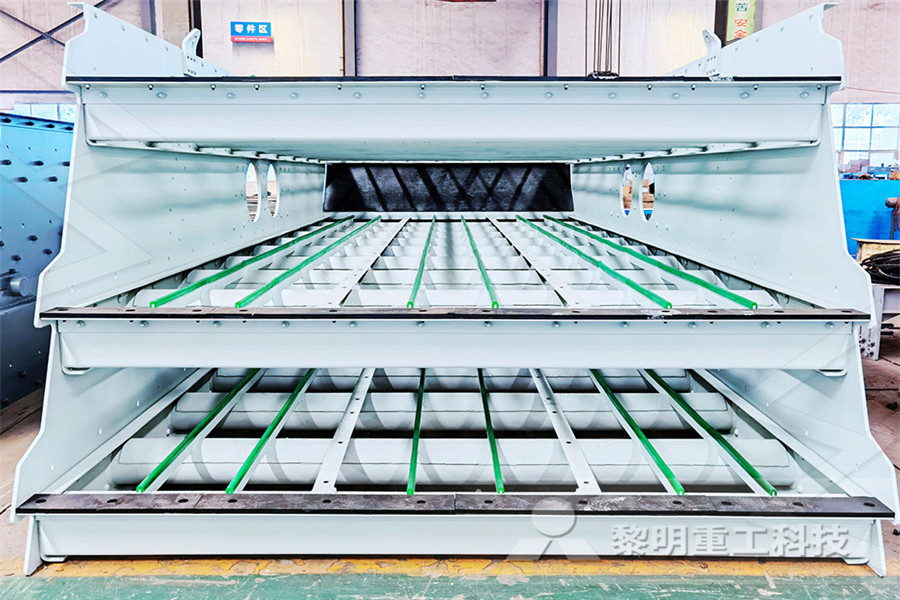
锤式破碎机结构构造,机械设计,Solidworks 三维建模哔哩哔
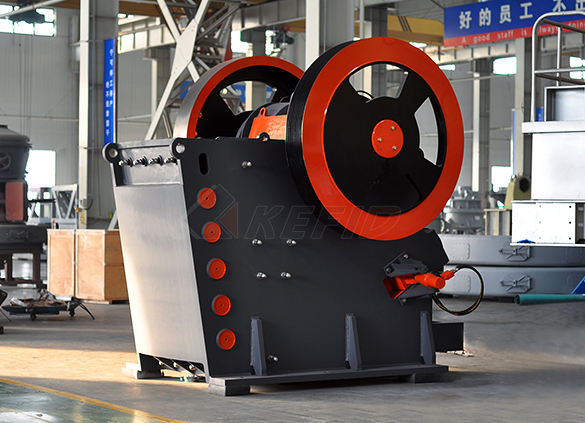
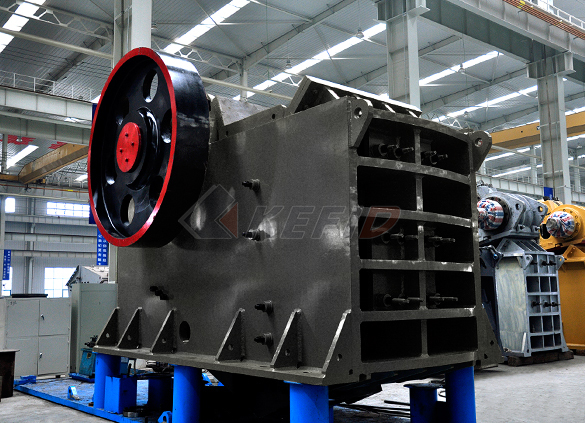
鄂式破碎机结构原3D演示 美岚矿机 1427 0 锤式破碎机设计,毕业设计,三维建模,机械设计 机械设计毕业论文 1686 0 三维动画展示颚式破碎机结构,专业! ! ! 世邦工业破碎机专家 1967 1 锤式破碎机的原理及优点 江西纽蒙特机械公司 456 0 【实战SolidWorks建模】钣金型材多自由度机械手SolidWorks三维建模实战 SWEDU 87万 170 锤式破碎机了解一 open 3D viewer and add point cloud *///创建视窗对象并给标题栏设置一个名称“3D Viewer”并将它设置为boost::sharedptr智能共享指针,这样可以保证指针在程序中全局使用,而不引起内存错误。 boost::sharedptrviewer(newvisualization::PCLVisualizer("3D PCL可视化pcl多线程可视化溪午X的博客CSDN博客三维点云——PCL基础 主讲:子宽 ,河海大学摄影测量与遥感专业硕士研究生,主要从事激光雷达数据处理与应用的研究。 发表SCI收录论文1篇,中文核心4篇,授权发明专利4项。 曾获得硕士国家奖学金、优秀研究生等荣誉称号。 目录: 1、PCL介绍 2、PCL的架构 三维点云——PCL基础哔哩哔哩bilibili

【激光雷达】认识点云库PCL 华为云社区
Nov 30, 2020 特征 PCL是 ROS (机器人操作系统)的3D处理主干。 点云库(PCL)可在许多操作系统上运行,并且预构建的二进制文件可用于Linux,Windows和Mac OSX。 PCL是根据BSD许可条款发布的,可免费用于商业和研究用途。 为了简化开发,将PCL分为一系列较小的代码库,可以 The Point Cloud Library (PCL) is a standalone, large scale, open project for 2D/3D image and point cloud processing PCL is released under the terms of the BSD license, and thus free for commercial and research usePoint Cloud Library The Point Cloud Library (PCL) is a standalone PCL(Point Cloud Library) 是用于2D / 3D图像和点云处理的大型开源跨平台的C++编程库。 PCL框架实现了大量点云相关的通用算法和高效的数据结构。 内容涉及了点云的获取、滤波、分割、配准、检索、特征提取、特征估计,表面重建、识别、模型拟合、追踪、曲面重建、可视化等等,这些算法可用于从嘈杂的数据中过滤出异常值,将3D点云缝合在一起, 01点云及其可视化 黑马机器人 PCL3D点云

浅谈:点云库Open3D、PCL以及CGAL(C++) 知乎 知乎专栏
点云库 (PCL)是一个独立的、大规模的以及开源的项目,主要用于2D/3D图像和点云处理,其遵循BSD协议,可用于商业和学术领域。 它的发展也有很长时间了,近些年随着点云的使用越来越广泛,感觉这个库也越来越多的人进行使用,它的相关资料也是最多的。 官方 / 22特点 221语言方面机器人学的工具中,点云是一种能够直观地表示和操作3D传感器所提供数据的方式,这类传感器包括飞行时间(TimeofFlioht)摄像头和激光扫描仪。该类传感器在3D坐标参考系下对空间进行有限点集采样构成点云。点云库(PCLPCL点云库的基本使用 知乎 知乎专栏Dec 24, 2018 PCL(Point Cloud Library)是跨平台开源C++编程库。 PCL架构图 PCL中处理惯导的基本接口程序: 创建处理对象(例如过滤、特征估计、分割等) 使用setInputCloud通过输入点云数据,处理模块 设置算法相关参数 调用计算(或过滤、分割等)得到输出 PCL的模块化[机器视觉]PCL学习笔记 xgyopen blog

(九)基于传统方法的激光雷达目标检测 知乎
本文将完成一个基于传统方法的激光雷达目标检测小项目,该项目使用C++ PCL点云处理库来进行障碍物的检测,其中包含知识点有PCL库的基本使用,点云下采样,平面分割,聚类,BoundingBox等,项目来源于Udacity 《Sensor Fusion》课程。 文末留有本文中使用的源码和相关材料,读者可以根据本文复现项目进行学习。 1总体思路 点云数据示例(图片 Apr 11, 2022 本教程演示了如何运行圆柱形模型的Sample Consensus分割。 为了使示例更实用一些,将以下操作应用于输入数据集 (按顺序): 距离15米以上的数据点被过滤 每一点的表面法线被估计 一个平面模型被分割,显示,并保存到本地 一个圆柱形模型 (在本数据集中是一个杯子)被分割,显示,并保存到本地 本次使用的数据集: PCL教程点云分割之圆柱体分割pcl::sacsegmentationSOC罗三炮 以下是两个点的PFH直方图演示: 默认PFH的实现,对每个特征都使用5个子区间进行分类,这里不包括距离 d d 。 这样就组成了一个125个浮点数元素的特征向量( 53 5 3 ),保存在数据类型 pcl::PFHSignature125 中。 以下是根据3D点与法线的空间邻域估计单个点的三个角特征的PFH(点特征直方图)。08特征检测与描述子 * 黑马机器人 PCL3D点云

试玩一下PPT的3D动画,非常震撼! 知乎 知乎专栏
3D素材是Win10自带的。 今天的教程主要内容有: 如何制作和获取3D素材。 保存3D素材的格式 在PPT中3D素材的动画设置。 利用“平滑”动画让PPT过度的更自然。 1、如何制作和获取3D素材。 我这推荐的是Windows自带的3D软件素材库,因为这个素材库的获取方式最简单。 在Win10系统的开始菜单栏下,有两个3D效果的软件,“ 画图3D ”和“ 3D查看器 ”,顾 May 19, 2014 3D演示程序中的许多效果与3D加速卡的性能密切相关,比如名为“飞跃”(flyby)的效果往展示穿越隧道的场景,而这类场景运行的帧率与显卡的填充率(fillrate)密切相关。 这也让3D演示程序有了实用的功能:作为显卡的基准测试(benchmark)程序,一部 Prophecy 的 3D 电影《彗星撞地球》是怎么压缩成 64k 图片的?上海矿山设备网提供沙石厂粉碎设备、石料生产线、矿石破碎线、制砂生产线、磨粉生产线 LM190K gaolingtushebei
PCL 点云分割与分类 Segmentation RANSAC随机采样一致性 平面
pcl::MinCutSegmentation 最小分割算法 (分割点云) 该算法是将一幅点云图像分割为两部分: 前景点云(目标物体)和背景物体(剩余部分) The MinCut (minimum cut) algorithm最小割算法是图论中的一个概念, 其作用是以某种方式,将两个点分开,当然这两个点中间可能是通过无数的点再相连的。 如果要分开最左边的点和最右边的点,红绿两种割法都是可行 The Point Cloud Library (PCL) is a standalone C++ library for 3D point cloud processing You can learn more about PCL by visiting its website, The documentation on will help you get started using PCL in your ROS applicationspcl ROS Wiki从Youtube搬运来的Jared Owen频道的直流电动机原理演示动画,请大家欣赏~~ 含中文字幕需手动开启~~ 查看更多有趣的3D工业动画及相关视频教程,请访问我B站的主页 https://spacebilibili/ 我做了相应的合集和播放列表,欢迎大家来学习~~ 我B站的【RG机械动画】合集所包含的视频,都是自己制作的动画,模型大部分是从网上收集 【Youtube搬运】直流电动机的工作原理【含中文字幕需手动开启
- 福建龙岩高岭土有限公司李启福
- 朝阳重型机械LD065LB额破机
- 粉碎机及球磨机
- 中信重机 矿渣立磨
- 粉碎煤的机子
- 每小时产1600T欧版粉碎机
- 250 400鄂破机报价
- 磷钇矿制沙
- 寻公路用石料破碎机
- 矸石物理参数
- 每小时产400T雷蒙粉砂机
- 乌鲁木齐破碎机销售
- 磷矿石鉴别特征
- 500机制砂生产线
- 河北河北张家口矿山设备
- 滑石粉碎机械价格
- 淀粉沙轮磨
- 破碎机除尘设备
- 鄂式破碎机意思
- 水泥立磨产量270th水泥立磨产量270th水泥立磨产量270th
- 湖北松枝破碎机厂
- 日本生产矿粉设备
- 一立方河砂有多少吨
- 打沙设备图片
- 山河智能70破碎机参数
- 鹅卵石磨粉机械多少钱一台
- 小型破碎棒
- 亮晶方解石
- 上海破碎机机械
- 颚式破碎机pe600×900价格
-

Primary mobile crushing plant

Independent operating combined mobile crushing station

Mobile secondary crushing plant

Fine crushing and screening mobile station

Fine crushing & washing mobile station

Three combinations mobile crushing plant

Four combinations mobile crushing plant
-

HGT gyratory crusher

C6X series jaw crusher
JC series jaw crusher
Jaw crusher

HJ series jaw crusher

CI5X series impact crusher

Primary impact crusher

Secondary impact crusher

Impact crusher

HPT series hydraulic cone crusher

HST hydraulic cone crusher
CS cone crusher

VSI6S vertical shaft impact crusher
Deep rotor vsi crusher
B series vsi crusher
-

Vertical grinding mill

Ultra fine vertical grinding mill

MTW european grinding mill

MB5X158 pendulum suspension grinding mill

Trapezium mill

T130X super-fine grinding mill

Micro powder mill

European hammer mill

Raymond mill
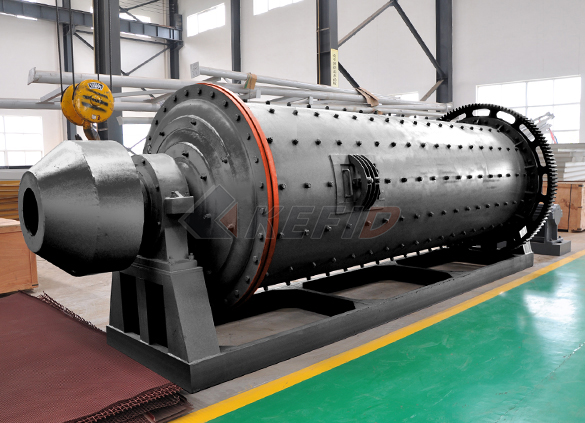
Ball mill
-
GF series feeder

FH heavy vibrating feeder

TSW series vibrating feeder

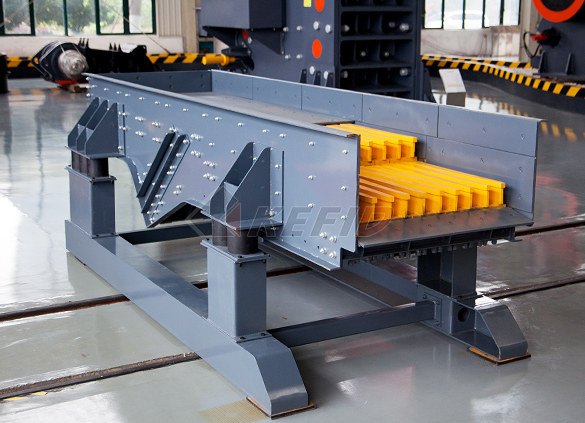
Vibrating feeder
Vibrating screen

S5X vibrating screen

Belt conveyor
Wheel sand washing machine

Screw sand washing machine